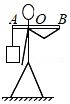
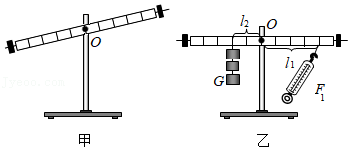
22.小明同学在“探究杠杆平衡条件”的实验中,所用实验装置如图甲所示:
(1)实验前还没有挂钩码的杠杆静止时左端低右端高,此时杠杆处于
(选填“平衡”或“非平衡”)状态,为便于测量力臂,应将平衡螺母向
(选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)在杠杆的两端挂钩码,不断改变动力或动力臂的大小,调节阻力或阻力臂的大小,使杠杆在原来的位置重新平衡,记录数据如下:
| 实验次序 | 阻力F2/N | 阻力臂l2/cm | 动力F1/N | 动力臂l1/cm |
| 1 | 1 | 10 | 2 | 5 |
| 2 | 2 | 10 | 2 | 10 |
| 3 | 2 | 15 | 3 | 10 |
| 4 | | 10 | 4 | 5 |
根据表中已有的数据可得出杠杆的平衡条件是
(用物理量表示),由此可知表中第4次实验所缺数据为
。
(3)第3次实验中,杠杆水平平衡后,将杠杆两端的钩码各向O点移动1cm后,杠杆将
(选填“左端翘起”“右端翘起”或“水平平衡”)。
(4)同组的小李同学实验时采用的是在另一侧用弹簧测力计来拉,如图乙所示,分别测出F
1、F
2和力的作用点到支点的距离,他发现F
1l
1≠F
2l
2,你认为他操作中的错误是
;为便于测量力臂,应将弹簧测力计拉杠杆的方向改为
。