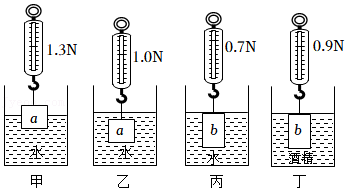
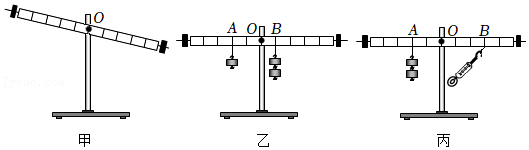
19.小明和小红一同完成“探究杠杆的平衡条件”实验。
【猜想与假设】
猜想一:动力×动力臂=阻力×阻力臂
猜想二:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离
【设计实验与进行实验】
(1)如图甲所示,杠杆静止在如图甲所示位置,此时杠杆处于
状态(选填“平衡”或“不平衡”),为了使杠杆在水平位置平衡,应向
调节平衡螺母(选填“左”或“右”)。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,这样做是为了方便测量
;同时,他将记录的数据填入表格。
(3)改变钩码的
和钩码的位置重复上述实验两次,记录的数据如表。
| 实验次数 | 动力F1(牛) | O、B间距离(厘米) | 阻力F2(牛) | O、A间距离(厘米) |
| 小明 | 1 | 1.0 | 5 | 0.5 | 10 |
| 2 | 1.5 | 10 | 1.0 | 15 |
| 3 | 1.0 | 10 | 2.0 | 5 |
| 小红和小明 | 4 | 0.8 | 15 | 1.0 | 10 |
| 5 | 1.4 | 15 | 1.0 | 10 |
【分析与论证】
根据小明同学的数据可验证猜想
(选填“一”、“二”或“一和二”)是正确的。而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还应改变动力或阻力的
进行实验。
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想
是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是
。通过以上探究,小明同学真正理解了力臂是支点到
的距离。




 飞机机翼
飞机机翼 高压锅容易把食物煮熟
高压锅容易把食物煮熟 地漏
地漏 用吸管喝饮料
用吸管喝饮料